第四章 信息邮递员-UART及其应用
一、串口启航
UART介绍:让数据飞!
在前一章我们学习了 GPIO,可以简单地输入输出高低电平实现控制外部设备, 但是在很多需要大量信息交互的场景,需要快速地高低电平的变化才能够在短时 间内传输足够的信息量。为了规范和统一这些传输信息的方式,使得不同的设备 能够直接进行通讯,一系列规则(包括通信线路、数据格式、传输速率等)被制 定出来,这些规则就是通信协议。 串行通信协议中,可以仅仅使用少数几条通信线路,将数据按位依次传输,每位数据占据固定的时间长度,完成系统间交换信息,通信距离可以从几十米到几千米。实际通信过程中,串行协议往往因为其外设简单,成本低而通信距离远更受欢迎。串行通信的通信协议主要有 UART、SPI、I2C 等。本章介绍配置最为简单的 UART,其他协议将在后续章节介绍。 UART(Universal Asynchronous Receiver Transmitter),即通用异步收发器,是一种通用的串行、异步通信总线。其包含两条数据线,连接两个设备的TX与RX,可实现全双工发送和接收数据操作。实际一般再加上一条线连接二者GND,用于将两设备电势的“0V参考点”校准同步,这种操作被称作共地。 异步指的是两设备时钟不需要同步;全双工指的是用了两根独立的数据线使数据收发互不干扰,此外还有单工(只能一方向另一方传输数据)和半双工(两者交替发送,无法同时收发)。 在使用 UART 进行通信时,两设备连接方式如下图所示:一个设备的 TX(Transmit发送端)连接另一个设备的 RX(Receive接收端),并且两设备共地。 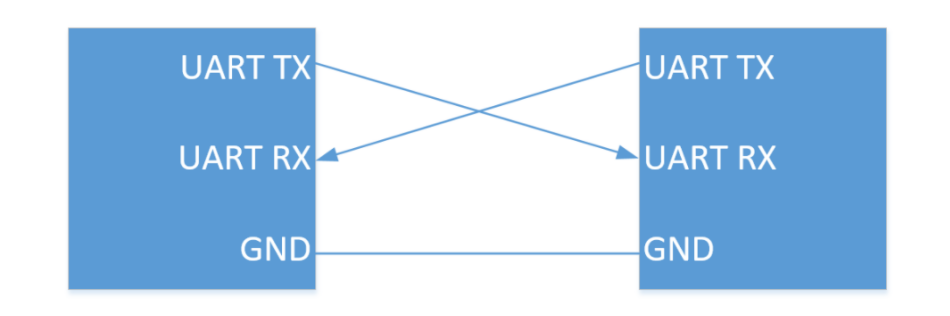
接下来介绍一下 UART 的通信协议。在通讯之前,双方需要先知道三个数据:波特率,数据长度和起始终止位。
- 波特率
- 定义:波特率表示一秒钟内传输/接收的电平信号(码元)数量。
- 作用:两个设备在UART通信中需要使用相同的波特率,才能保证正确接收数据。
- 工作原理:接收设备按照已知的波特率进行间隔采样(采样间隔时间为1秒/波特率)从而得到数据。
- 数据帧是UART通信中传输的基本单位,包含了起始位、数据位和停止位。一个数据帧的格式如下图所示。
- 空闲状态:在数据传输之前,数据线通常保持在高电平,这时处于空闲状态。
- 起始位:当数据传输开始时,数据线会从高电平跳到低电平,这一部分被称为起始位。
- 数据位:紧接着起始位的是实际传输的数据位,通常是8或9个周期。
- 停止位:数据位之后,紧跟着停止位,用于表示该次传输的结束。
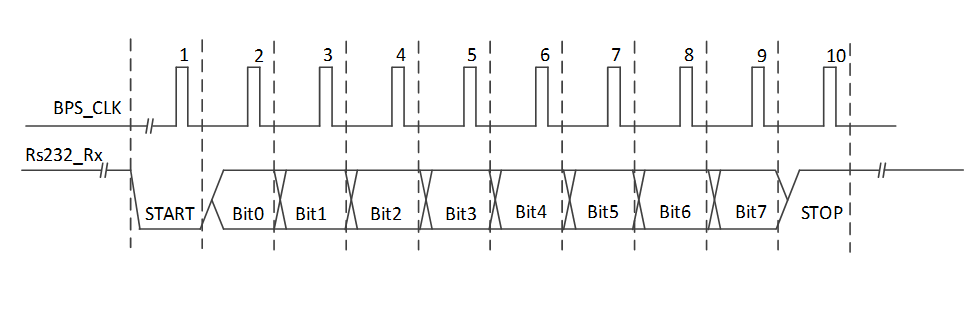 UART数据帧格式
UART数据帧格式
在开始传输数据之前,通常需要一个短暂的延迟,以确保数据稳定。这时可以通过类似delay()的函数来处理,避免采集到不稳定的数据。 以上就是UART通信的基本特点。在设备之间进行通信时,双方必须确保相同的配置,以便能够正常通讯。具体的STM32配置将在下面详细介绍。 另外,STM32中还有USART(universal synchronous/asynchronous receiver&transmitter 通用同步/异步收发器),相比UART,USART支持同步通信模式,并增加了更多功能。对于感兴趣的读者,可以深入了解USART的更多特性。对于初学者来说,USART和UART可以视为功能相似的外设。
二、 控制大师:寄存器的魔法
寄存器探秘
本节介绍 UART 常用的寄存器 首先是状态寄存器 USART_SR,如下图所示。该寄存器的各位(Bit)表示了当前 传输过程的状态,例如 TXE 表示发送数据寄存器为空,TC 表示发送完成,RXNE表示读取寄存器不为空,ORE 表示溢出错误,FE 表示帧错误等。 这里我们关注一下两个位,第 5、6 位 RXNE 和 TC。
RXNE(接收数据寄存器非空)
当该位被置1时,表示USART已经接收到数据,可读取USART_DR(数据寄存器)。为了避免数据丢失,应尽快读取USART_DR,此操作会自动清除RXNE位。此外,也可以手动向该位写入0来清零。TC(发送完成)
当该位被置1时,表示USART_DR中的数据已完全发送完毕。如果启用了该位的中断(TC中断),则会触发中断信号。清除TC位的方法有两种:- 方法1:先读取
USART_SR,再写入USART_DR。 - 方法2:直接向TC位写入0。
- 方法1:先读取
此处提到的清零操作与实际应用相关。需要清零的原因是在STM32串口通信中,TC(Transmission Complete)标志位在串口初始化后默认为1。当数据从发送数据寄存器(TDR)完全移到移位寄存器并发送出去后,TC标志位会被置为1。如果不清零TC标志位,新的数据发送请求可能会被误判为不需要发送,导致数据发送覆盖。 具体介绍其他各位及其相应状态篇幅过长,感兴趣的读者自行了解。 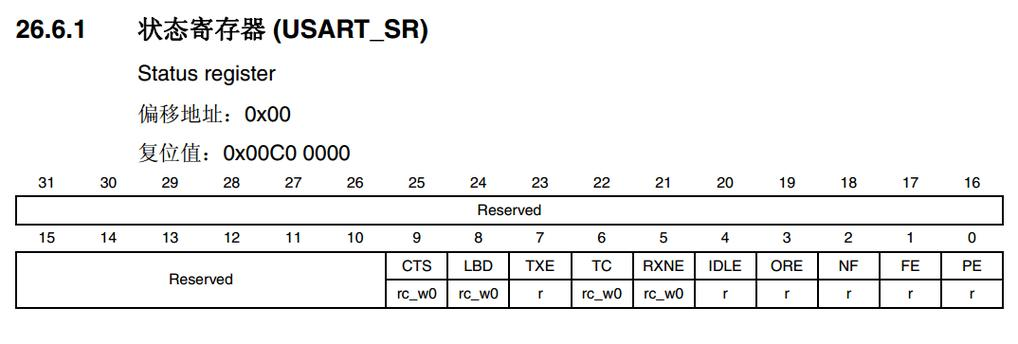 USART_SR 寄存器 27
USART_SR 寄存器 27
STM32 的发送与接收是通过数据寄存器 USART_DR 来实现的,这是一个双寄存器,包含了 TDR 和 RDR。当向该寄存器写数据的时候,串口就会自动发送,当收到数据的时候,也是存在该寄存器内。该寄存器的各位描述如下图所示:  USART_DR 寄存器
USART_DR 寄存器
可以看出,虽然USART_DR是一个32位的寄存器,但实际上只有低9位(DR[8:0])用于存储数据,其余部分是保留位。
DR[8:0]:包含了串口传输的数据,既包括发送的数据,也包括接收的数据。- 由于
USART_DR是一个双功能寄存器,它由两个部分组成:- TDR(发送数据寄存器):用于存放待发送的数据。
- RDR(接收数据寄存器):用于存放接收到的数据。
在发送操作时,向USART_DR写入数据时,数据会自动写入TDR;而在接收操作时,读取USART_DR时,数据会自动从RDR中提取。
此外,UART还包含波特率寄存器、预分频寄存器和三个控制寄存器,这些寄存器共同决定了串口的其他设置,这里不再一一详述,感兴趣的读者可以进一步了解。
UART库函数
在 stm32f4xx_hal_uart.h 文件中,UART 相关的库函数声明如下图所示。实际上,只有最上面的 Transmit 和 Receive 函数直接与 UART 数据传输相关,其余函数则涉及中断、DMA 等功能。对于初学者来说,在掌握基本的 UART 功能后,可以再深入了解这些高级功能。在实验一中,我们仅使用了 Transmit 和 Receive 函数,而实验二则涉及了 Transmit_DMA 和 Receive_DMA 函数。 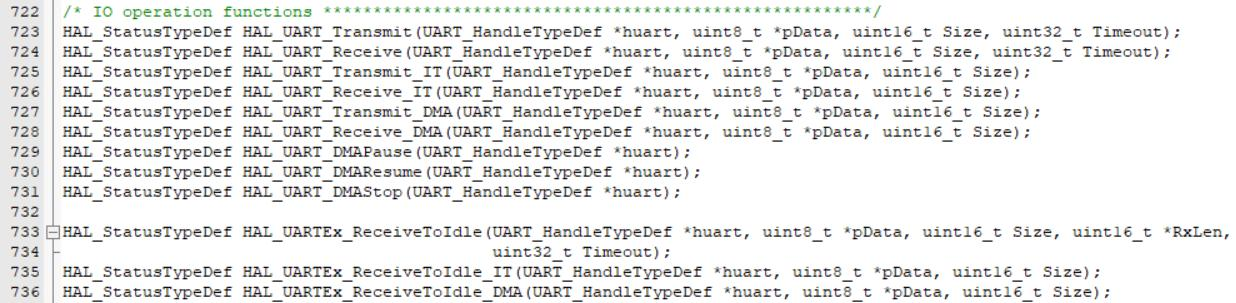 部分UART库函数
部分UART库函数HAL_UART_Transmit 函数用于通过 UART 传输数据。它的声明如下:
HAL_StatusTypeDef HAL_UART_Transmit(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout);它的参数依次为:
- UART 句柄:指定使用的 UART 外设的句柄。例如,在生成的
usart.c文件中,USART3的句柄通常会自动声明为UART_HandleTypeDef huart3。 - 数据指针:指向待发送数据的存储区域。这个参数通常是一个数组或字符指针。
- 数据长度:需要发送的数据的字节数。例如,如果要发送的字符串有 5 个字符,则填入 5。
- 超时时间:指定最大等待时间,单位为毫秒。通常,可以将其设置为最大值
0xFFFF,表示没有时间限制。
举个例子,如果你要使用 USART3 发送字符数组 BUF[5] = "good!" 中的内容,可以调用如下函数:
HAL_UART_Transmit(&huart3, BUF, 5, 0xFFFF);如果你想通过 USART3 发送一个变量,比如整数 num = 12345,可以调用如下函数:
HAL_UART_Transmit(&huart3, (uint8_t*)&num, sizeof(num), 0xFFFF);其中,注意HAL_UART_Transmit() 的函数中pData 是 uint8_t* 类型,所以(uint8_t*)&num 的作用是将 num 的地址转换为 uint8_t* 类型。
同理,HAL_UART_Receive 函数用于接收数据,参数与 HAL_UART_Transmit 几乎相同,只是第二个参数是接收数据的存储区域指针,用于存放接收到的数据。
简而言之,HAL_UART_Transmit 用于发送数据,而 HAL_UART_Receive 用于接收数据,二者的调用格式几乎一致,关键在于指定正确的数据存储区和相应的长度。
三、 实验1-Hello,STM32!第一个串口通信
实验要求
- 将开发板与上位机连接,当按下单片机上的按键时,通过 UART 向上位机发送字符串 "SEU",并在上位机的串口调试助手中显示。
- 程序同时会监听UART串口的数据接收,一旦接收到数据,就将数据通过UART回传。
实验思路
按键操作与前一章相同,在每次循环中检测按键的高低电平,以判断是否被按下。不同的是,在检测到按键按下后,操作需要改为通过 UART 库函数向上位机发送相应的字符串。
初始化配置
第一步 设置 PC13 为输入模式 (GPIO_Input)。 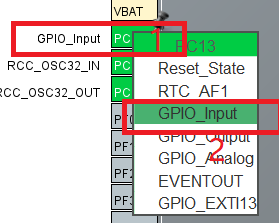
第二步 右键点击PC13将PC13的User Label(用户标签)修改为B1(或者其他任何名称),方便后续编程。 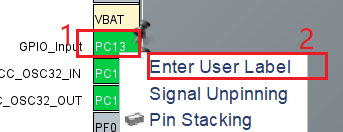

USART3 保持如下默认配置即可,无需改动。 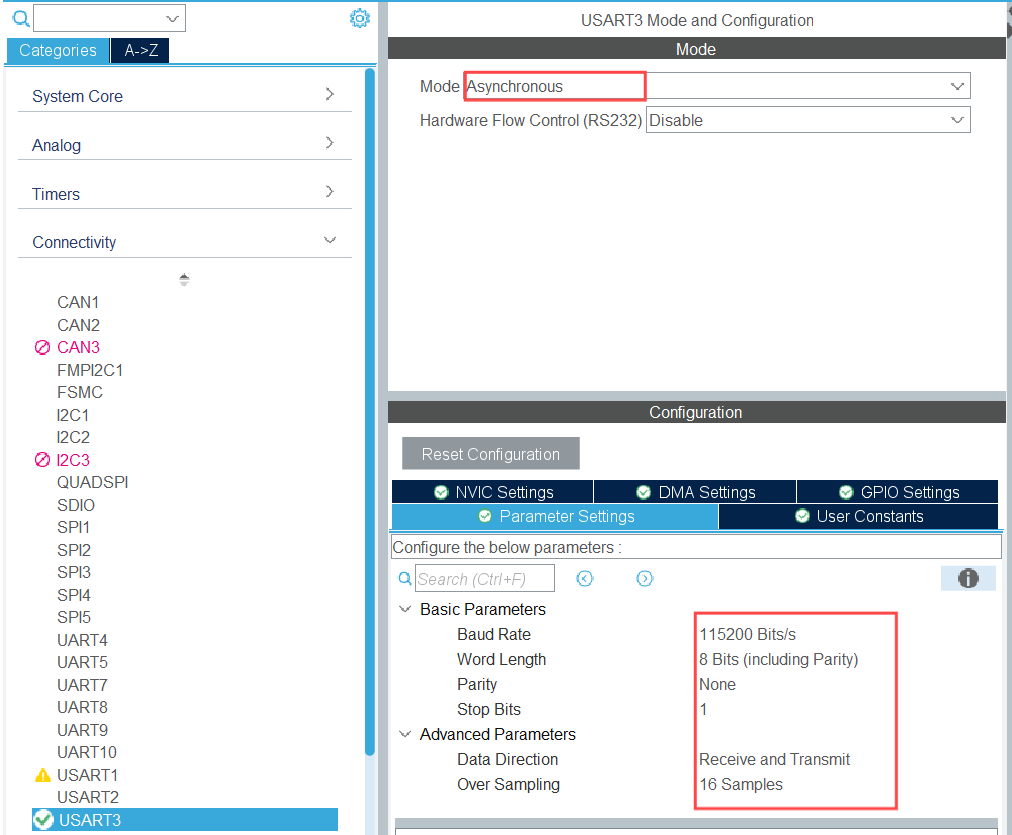
主程序代码
在USER CODE BEGIN 0处,添加如下语句:
/* 检测按键是否按下函数 */
uint8_t KeyPressed(void)
{
if (HAL_GPIO_ReadPin(B1_GPIO_Port, B1_Pin) == GPIO_PIN_SET)
{
HAL_Delay(20); // 防抖
if (HAL_GPIO_ReadPin(B1_GPIO_Port, B1_Pin) == GPIO_PIN_SET)
{
while (HAL_GPIO_ReadPin(B1_GPIO_Port, B1_Pin) == GPIO_PIN_SET); // 等待松开
return 1; // 按键按下
}
}
return 0; // 按键未按下
}在USER CODE BEGIN 2处,添加如下语句:
uint8_t rxData; // 接收数据缓冲区在USER CODE BEGIN WHILE处,添加如下语句:
// 1. 按键按下,发送 "SEU"
if (KeyPressed())
{
uint8_t msg[] = "SEU";
HAL_UART_Transmit(&huart3, msg, sizeof(msg) - 1, HAL_MAX_DELAY);
}
// 2. 轮询 UART 接收数据
if (HAL_UART_Receive(&huart3, &rxData, 1, 10) == HAL_OK) // 10ms 超时
{
// 3. 回传收到的数据
HAL_UART_Transmit(&huart3, &rxData, 1, HAL_MAX_DELAY);
}实验结果
将烧录好程序的开发板与电脑连接,打开串口调试助手(如果没有该软件,可以在软件商店搜索“串口调试助手”并下载一个正规版本,功能大致相同)。在串口调试助手中,设置与STM32中初始化USART3的参数一致,特别注意选择正确的波特率和串口号(即ST-Link对应的串口号)。配置完成后,界面应如下图所示。 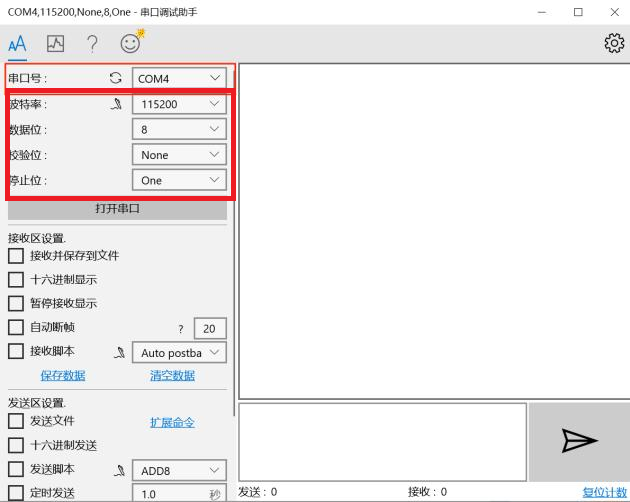
此时,按下开发板上的按键,串口调试助手的屏幕上应显示"SEU"字符串,通过串口发送任意字符,单片机能接收到这个字符并立即回传,如下图所示,表示实验成功。 
四、 实验2-DMA驾到:不定长数据不再是难题
什么是DMA
DMA(Direct Memory Access直接内存访问)用于在外设与存储器之间,或存储器与存储器之间实现高速数据传输。通过 DMA,可以在无需 CPU 参与的情况下快速移动数据,从而节省 CPU 资源,允许 CPU 执行其他任务。
实验要求
将开发板与上位机连接,使用上位机的串口调试助手向单片机发送数据。单片机在接收到数据后,将相同的数据返回给上位机,以确认接收成功。
初始化配置
第一步 在 CubeMX 界面中,进入 USART3 的配置页面,点击 DMA Settings 选项卡中的 Add 按钮,即可添加 DMA 通道。其中,TX 用于 USART3 的发送,RX 用于 USART3 的接收。分别添加 TX 和 RX 通道后,保持其余参数为默认值即可。 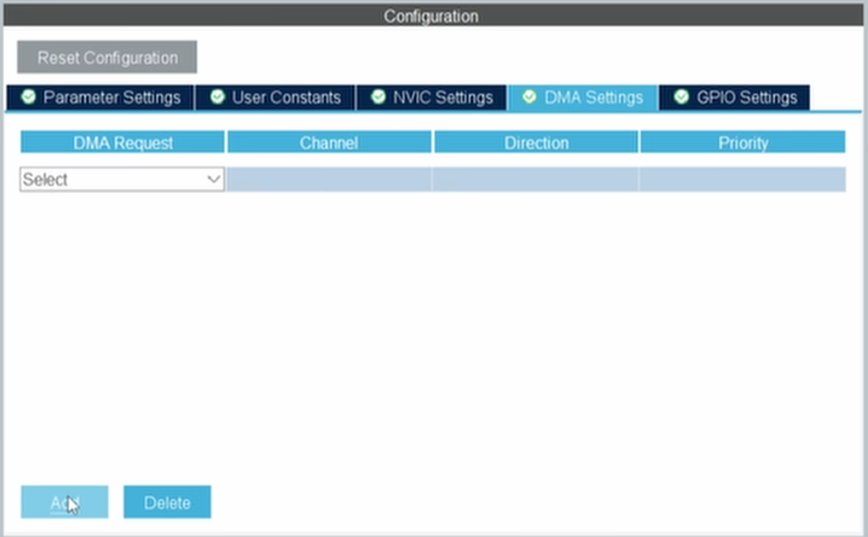 第二步 开启USART3 global interrupt,即后面会学习到的中断.
第二步 开启USART3 global interrupt,即后面会学习到的中断. 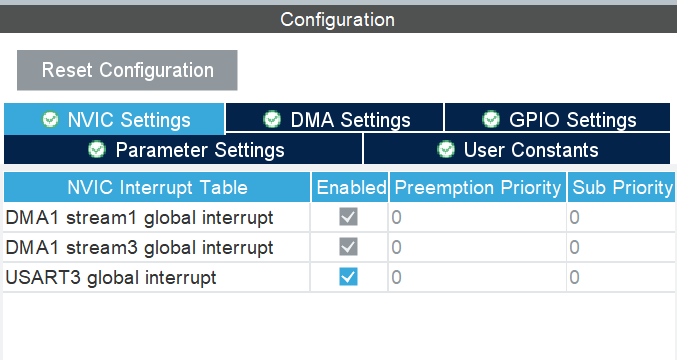 USART3的其余参数保持默认值即可。
USART3的其余参数保持默认值即可。
主程序代码
由于要接受不定长数据,可以定义一个较大的数组 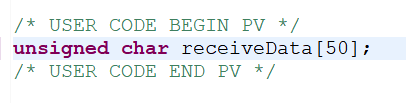
在main函数中用DMA接收数据,我们采用HAL_UARTEx_ReceiveToIdle_DMA函数。
HAL_UARTEx_ReceiveToIdle_DMA(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);其中第一个参数和第二个参数与Transmit相同,第三个参数为接收数据的最大长度,一般填写接收数组的长度防止数组越界。 
当该函数执行完成后,系统会触发中断函数:
HAL_UARTEx_RxEventCallback(UART_HandleTypeDef *huart, uint16_t Size)在该回调函数中,我们可以处理接收完成后的数据。使用HAL_UART_Transmit_DMA可通过 DMA 发送接收到的数据,同时重新启动 UART 接收,以等待下一次数据传输。 
实验结果
将烧录好程序的开发板连接至电脑,并打开串口调试助手。确保其参数与 STM32 初始化 USART3 时的配置完全一致,并选择 ST-Link 对应的串口号。此时,在调试助手中输入数据,屏幕应显示单片机接收并回复的数据,如图所示,实验成功。 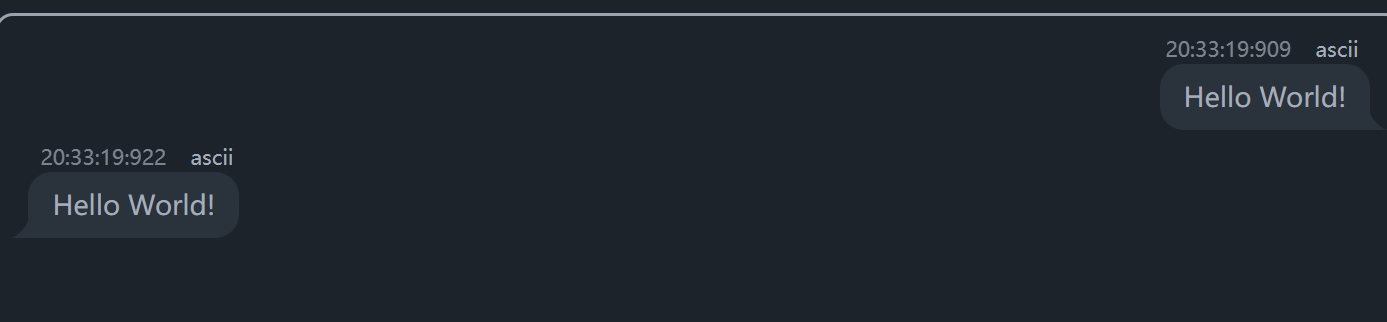
五、 串口万花筒:发现UART的无限可能
实验中使用Micro-USB连接线进行UART通信的原因
尽管我们常常提到 UART 通信需要设备之间 RX 接 TX,TX 接 RX 并 共地,但在这个实验中之所以能够直接通过 Micro-USB 完成通信,是因为开发板的硬件设计中有额外的 硬件模块 来“桥接”通信信号。 在这个实验的开发板上,USART3的通信信号从核心 MCU(STM32F413)的 PD8(TX) 和 PD9(RX) 引出,但它们并没有直接连接到 Micro-USB 接口,而是被引入到另一个芯片(STM32F103)。 STM32F103 芯片是开发板上集成的ST-LINK/V2-1 模块的一部分。ST-LINK 的主要功能包括:
- 下载和调试功能:通过 USB 接口与 PC 连接,用于程序的烧录和调试。
- 虚拟串口功能(VCP,Virtual COM Port):将 USART3 的通信信号 转换为 USB 信号,并通过 Micro-USB 接口传输到 PC(反向也适用)。
在这里,ST-LINK/V2-1 模块相当于一个 UART 转 USB 的硬件适配器,负责桥接 UART 信号和 PC 上的 USB 通信。
由于 ST-LINK/V2-1 模块在硬件上已经完成了 信号适配与线路连接 的工作,因此在实验中直接使用 Micro-USB 连接线即可实现 UART 通信,而无需手动将开发板的 RX 和 TX 引脚接线到 PC 的 USB 转串口模块上。实验中UART通信的底层逻辑并未改变,只是隐藏了手动接线的过程。
STM32与UART:从调试到项目应用的完美转换
串口不仅是调试的工具,它也是用户和嵌入式系统交互的一种方式。你可以通过串口接受来自用户的输入命令,控制开发板的行为。 应用实例:比如,开发一个串口控制的LED灯具,用户通过PC或上位机向开发板发送命令(例如“开启灯光”、“调节亮度”等),开发板根据接收到的命令控制灯的状态。也可以实现串口通信控制电机、传感器等其他外设。
openmv模块
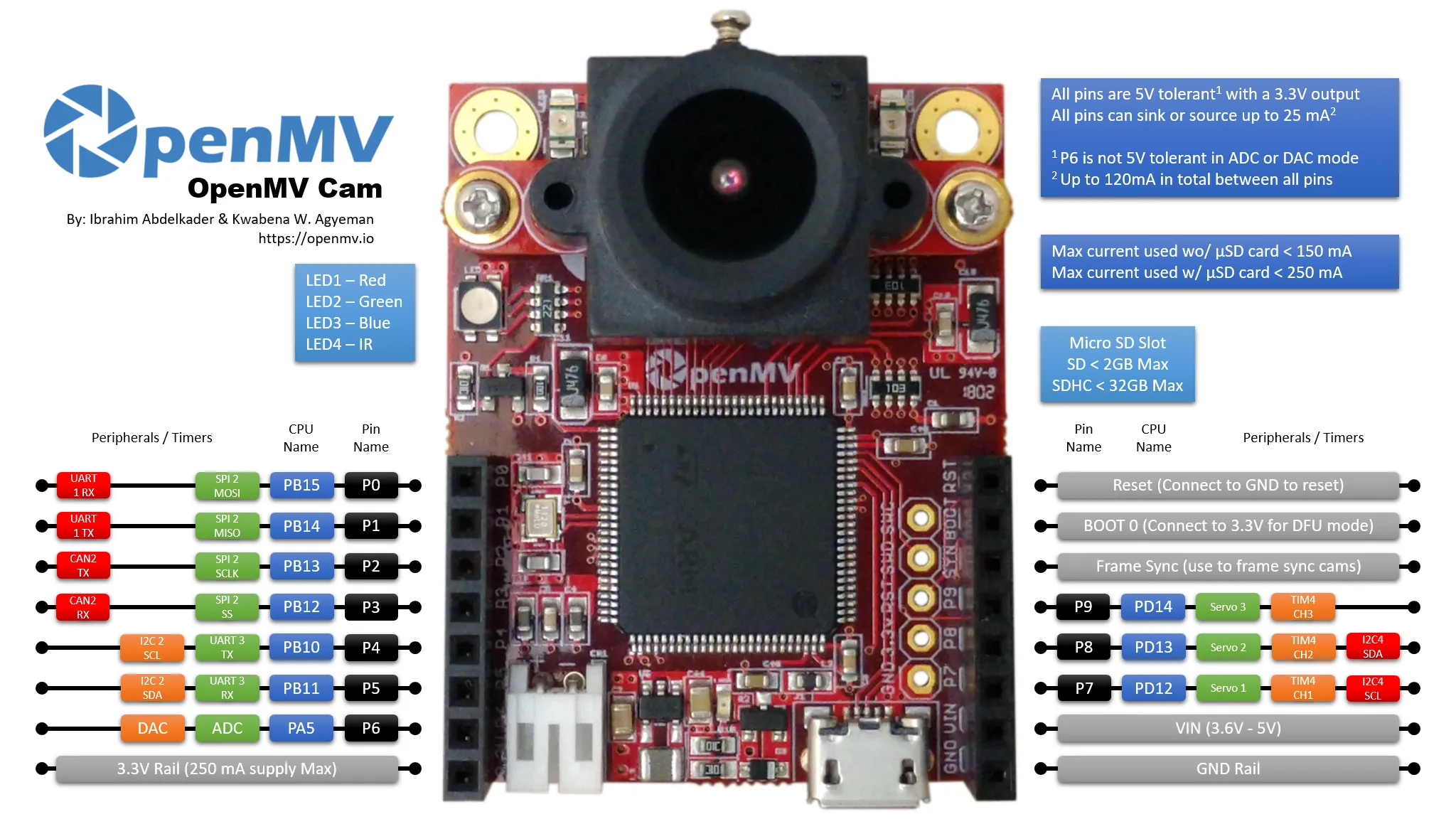
此图是电子类竞赛中常常用作图像识别的openmv摄像头模块,该模块自带一个STM32H7芯片,使用配套的开发环境可以使用python语言编写相关的图像处理的程序,由该模块本身运行,而该模块和系统的核心主单片机之间常常接线、供地使用UART通信。例如系统是一个小车,遇到红灯需要停车,则openmv中编程实现识别红灯并使用UART发送停车的信息,主单片机实现UART接收停车信息后控制车辆停止的功能。
串口与无线模块的联动:突破物理界限
通过蓝牙模块,UART接口实现了无线透传功能,简化了设备间的数据连接方式,同时保留了UART协议简单、可靠的特性。这种方法适合需要低功耗、短距离通信的应用场景。 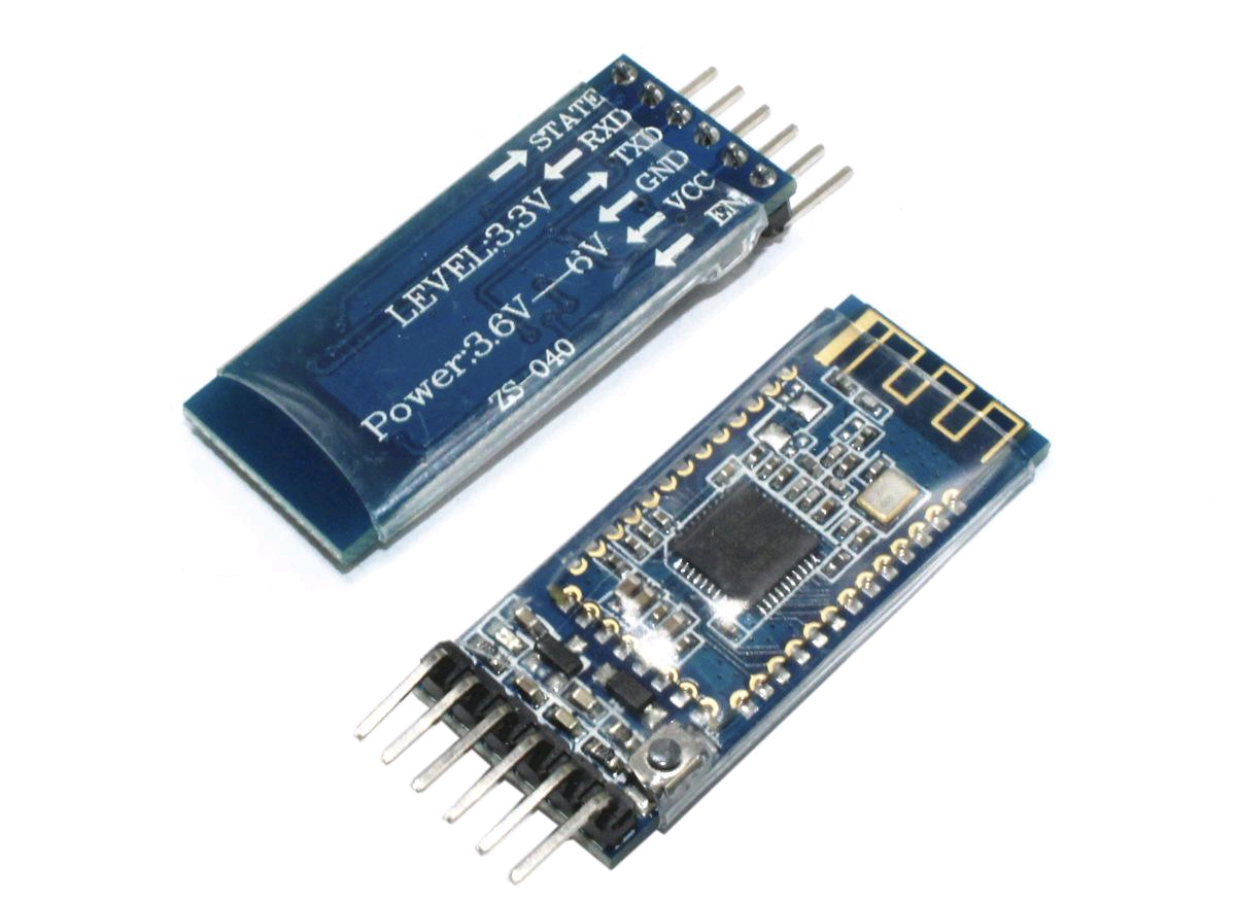
蓝牙模块
连接时注意线序正确:TX-RX RX-TX
蓝牙模块的工作模式: 主从机模式:一个蓝牙模块设为“主机”(Master),另一个设为“从机”(Slave)。
- 在建立通信连接前,从机要向外广播自己的信息。
- 主机扫描到附近正在广播的蓝牙设备后,就发起连接。
数据的传输过程
- 单片机A的UART通过TX将数据发送到连接的蓝牙模块A。
- 蓝牙模块A将接收到的数据通过无线信号发送到蓝牙模块B。
- 蓝牙模块B接收无线数据,并通过RX将数据传递给连接的单片机B。
- 单片机B接收到数据后进行进一步处理。
三种常见的数据传输方式
在UART通信中,轮询模式、中断模式和DMA模式是三种常见的数据传输方式,各有优缺点和适用场景。根据项目需求,合理选择合适的模式可以显著提升系统性能和资源利用率。
工作原理
- 轮询模式(Polling Mode)
主机通过不断检查UART的状态寄存器,判断是否有数据可读或数据发送完成。需要接收固定长度的数据。 - 中断模式(Interrupt Mode)
通过启用 UART 的中断功能,当接收或发送完成时触发中断,CPU暂停当前任务去处理UART事件。 具体的中断操作将在下一节中介绍。 - DMA 模式(Direct Memory Access Mode) 通过 DMA 控制器直接将数据从 UART 外设搬运到内存(或反向),无需 CPU 参与传输。
特性对比
| 特性 | 轮询模式 | 中断模式 | DMA 模式 |
|---|---|---|---|
| CPU占用 | 高 | 中 | 低 |
| 实时性 | 低 | 中 | 高 |
| 实现复杂度 | 简单 | 中 | 较复杂 |
| 适合数据量 | 小 | 中 | 大 |
| 应用场景 | 简单任务 | 实时性任务 | 高吞吐量传输 |
如何选择?
- 数据量小、任务简单:选择轮询模式,易于实现。
- 实时性要求中等:选择中断模式,减少 CPU 负担。
- 大数据传输且要求高效率:选择 DMA 模式,解放 CPU。
六、 挑战时刻!
点亮星空- 串口控制LED闪烁模式
使用查询 (非中断) 方式, 实现串口接收处理功能, 满足以下要求:
当上位机发送字符'a'时,LD1连续闪烁5次, 每次闪烁问隔 200ms; 当发送字符'b'时, LD2连续闪烁3次, 每次闪烁间隔 500ms; 当发送字符'c'时, LD1和LD2同时闪烁3次, 每次闪烁问隔 300ms; 当发送其他字符时,LD1和LD2保持当前状态。
本章修改记录
2025/2 完成编写 (张佳、杨子骞、孙苡朔)
2025/3 网页适配 (顾雨杭) :::